Упрощенное рассмотрение динамики движения вертолёта
Основой для вывода и использования упрощенных уравнений движения вертолёта является допущение о замене несущего винта с его сложной динамикой – равнодействующей силой. При этом предполагается, что маховое движение лопастей изменяется мгновенно при изменениях параметров движения вертолёта (скорость, угол атаки, угловая скорость) и углов общего и циклического шага лопастей.
Как правило, при таком рассмотрении не учитываются связи между продольным и боковым движениями и эти движения рассматриваются отдельно. При анализе продольного движения рассматриваются следующие уравнения:
![]() ; (2.1)
; (2.1)
![]() ; (2.2)
; (2.2)
![]()
![]()
![]()
![]() ; (2.3)
; (2.3)
В уравнениях (2.1), (2.2), (2.3) учитываются только переменные ![]() и
и ![]() .
.
Входными величинами являются продольный наклон кольца автомата перекоса æ и величина общего шага φ0.
Соотношение для сил и моментов на несущем винте
Зависимости сил и моментов на несущем винте от параметров движения должны быть известны для определения параметров движения, соответствующих установившемуся режиму полета, балансировочных положений органов управления и для определения коэффициентов уравнений движения вертолета (производных устойчивости).
В практике расчетов устойчивости балансировочные отклонения управления и производные устойчивости определяются на основании данных детального аэродинамического расчета, выполняемого с помощью ЦВМ.
Основу упрощенного метода определения названных величин составляет импульсная теория несущего винта. В импульсной теории рассматривается несущий винт с постоянными углами установки лопастей по азимуту. В то же время для уравновешивания сил и моментов, действующих на вертолет, необходимо определенное введение циклического шага, зависящее от режима полета. Для получения возможности применения выводов импульсной теории к винту с переменным циклическим шагом вводится понятие эквивалентного несущего винта.
Продольная балансировка
Рассмотрим силы и моменты, действующие на вертолет в продольной плоскости (имеем ввиду одновинтовой вертолет).
На рис. 2.1 приведена схема действия упомянутых сил и моментов.
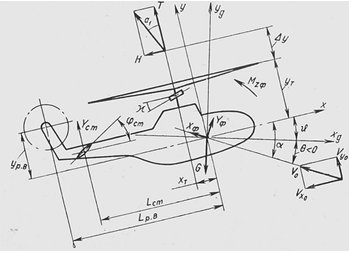
Рис. 2.1. Схема сил и моментов, действующих на вертолет в установившемся режиме полета (продольное движение).
Начало координат лежит в центре масс вертолета. Ось y связной системы координат параллельна оси несущего винта, ось x направлена вперед. Ось yg земной системы координат направлена вертикально. Как обычно, ![]() – угол тангажа вертолета;
– угол тангажа вертолета; ![]() – угол атаки несущего винта и вертолета;
– угол атаки несущего винта и вертолета; ![]() – угол наклона траектории. Рассмотрим уравнения равновесия вертолета:
– угол наклона траектории. Рассмотрим уравнения равновесия вертолета:
 (2.4)
(2.4)
где X, Y, Mz – соответственно суммы сил, действующих на вертолет вдоль осей x и y и моментов относительно оси z.
В развернутом виде они равны (без учёта продольной и боковой сил и крутящего момента рулевого винта):
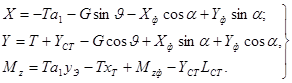 (2.5)
(2.5)
Значение XФ может быть подсчитано по формуле
![]() , (2.6)
, (2.6)
где Sвр – площадь эквивалентной вредной пластинки фюзеляжа.
Величиной Yф, если вертолет не имеет крыла, можно пренебречь.
Величину продольного момента фюзеляжа можно подсчитать по формуле:
![]() . (2.7)
. (2.7)
Материалы о транспорте:
Расчет и технико-экономическое обоснование параметров доставки груза
Характеристика судна т/х «Сормовский -44» Проект 1557 Класс Регистра: I II СП Мощность: 1320 л.с. Грузоподъемность: 2700 т Грузовместимость: 4297 м3 Валовая вместимость: 2240 рег.т. Чистая вместимост ...
Назначение участка
Участок предназначен для монтажа и демонтажа, ремонта шин, дисков колес, замены вентилей, колец кольцевых дисков, восстановления камер, и балансировки колес в сборе. Детали на шиномонтажный участок п ...
Формы организации движения флота. Понятие грузовой
линии
В зависимости от условий работы на РТ выделяются следующие формы организации работы транспортного флота: линейная; рейсовая; экспедиционная. Линейная. Это основная форма. Она предусматривает следующе ...
Навигация
- Главная
- Устройство и эксплуатации железнодорожного пути
- Многоковшовые экскаваторы
- Антикоррозийная обработка
- Международные транспортные коридоры
- Интеллектуальные транспортные системы
- Автомобильные бензины
- Материалы
- Карта сайта